
Researchers at Rice University‘s Brown School of Engineering created a new method of 3D printing objects that can be manipulated when exposed to changes in temperature, current, or stress to take an alternative form. It is called “Reactive 4D Printing” and it separates the printing and shape programming steps used in other 4D printing technologies to provide access to various architectures and almost arbitrary shape changes.
The method was jointly developed by Rafael Verduzco and Morgan Barnes, an engineering graduate student in the Verduzco laboratory of the Department of Chemical and Biomolecular Engineering at Rice University. The method shows great hope in applications such as biomedical equipment and soft robots. There is a growing interest in active substances in the field. Respond to external stimuli by undergoing reversible shape changes. Using 4D printing, objects can be pre-programmed to respond to a series of different stimuli, changing their shape over time.

According to Rice, after creating a rubber-like, deformable material, the researchers first reported their ability to manufacture deformed structures in molds in 2018. The material can be transformed from a complex geometric shape to Another shape on demand. However, using the same chemical methods for 3D printing restricts the structure to shapes that lie on the same plane, which means that other complex curvatures cannot be programmed into alternative shapes.
“Overcoming that limitation to decouple the printing process from shaping is a significant step toward more useful materials,” said Verduzco, who is also an associate professor of Chemical and Biomolecular Engineering and of Materials Science and Nanoengineering. “These materials, once fabricated, will change shape autonomously. We needed a method to control and define this shape change. Our simple idea was to use multiple reactions in sequence to print the material and then dictate how it would change shape. Rather than trying to do this all in one step, our approach gives more flexibility in controlling the initial and final shapes and also allows us to print complex structures.”
The purpose of reactive 3D printing research on shape programmable liquid crystal elastomer actuators published in the journal ACS Applied Materials and Interfaces of the American Chemical Society is to decouple the printing and shape programming steps to achieve almost any shape change of 3D printed liquid crystal elastomers (LCE), this is a promising material for soft robots and actuators.
In their thesis, Verduzco and Barnes and co-author Rice graduate student Seyed Sajadi, Rice research scientist Muhammad Rahman, Rice chemistry professor Pulickel Ajayan and Shaan Parekh (students of John Foster Dulles High School in Sugar Land, Texas) described their production with New methods for materials with complex architectures that would otherwise be difficult or impossible to print using traditional printing methods and may be useful to the wider 3D printing community.
The author described in the study: “4D printing is inherently more complicated than 3D printing because it requires simultaneous printing of structures and defining or programming shape responses in the generated material.” Using known 4D printing methods, “can be caused by The predetermined path of the local out-of-plane bending is printed to achieve complex shape changes.” However, these methods “significantly limit the shapes and/or shape responses that can be produced.” In contrast, the authors claim this new universal The 3D printing method is the key to unlocking achievable shapes and shape responses.
In this case, 3D printing is performed using the Engine High-High Resolution Hyrel 3D printer. The research team says that their three-step printing process has been customized to meet some limitations in material processing, network composition, and solvent composition. As described in the study, it involves first printing the LCE precursor ink into a reactive catalyst bath to produce a complex structure. At this stage, the sample is soft but can be carefully removed from the solvent bath. Once removed, the samples were dried by heating to 80°C overnight. In the third reaction step, the sample is mechanically deformed into the desired shape and subjected to UV curing to achieve the resulting shape programming LCE, which can switch between the printed shape and the programmed shape during heating and cooling, respectively.
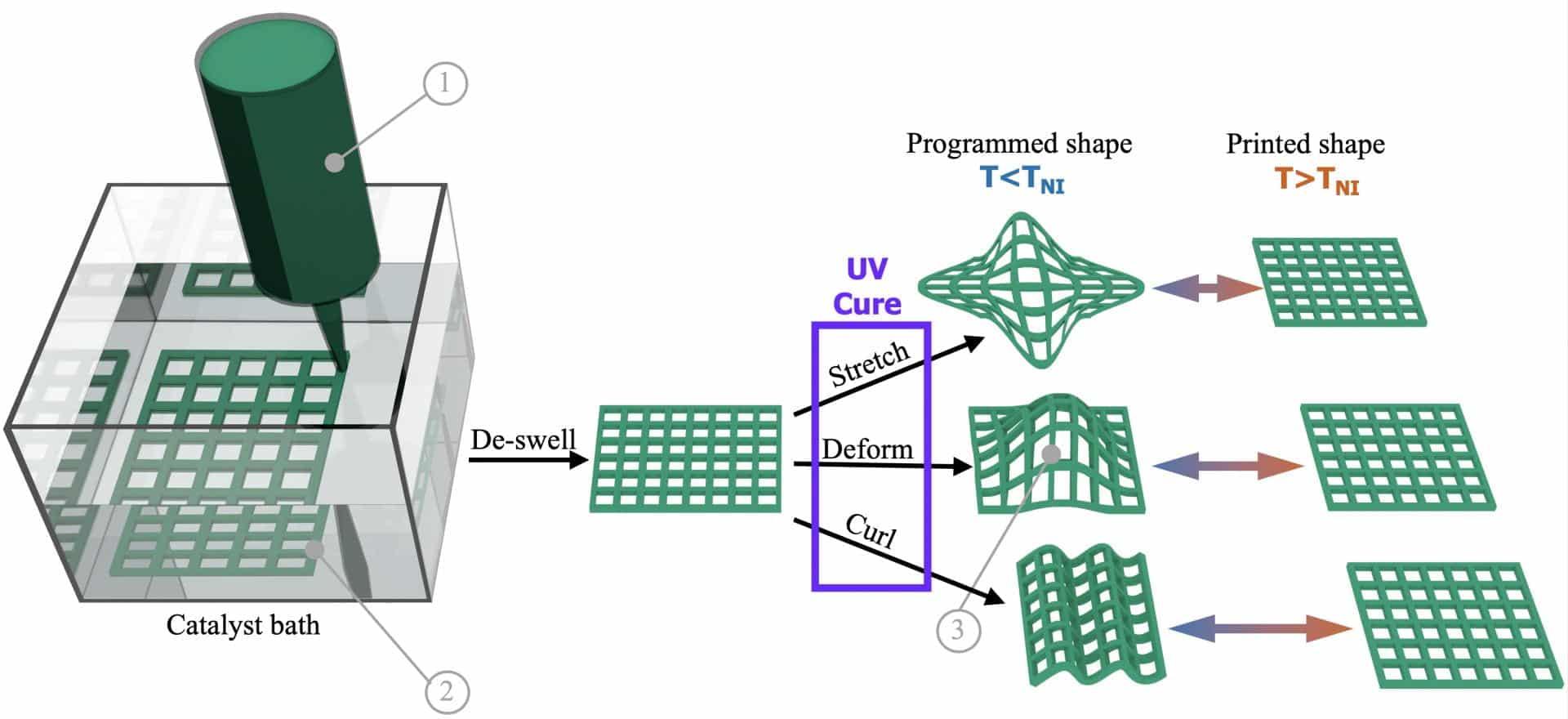
Rice believes that the challenge for the laboratory is to create a liquid crystal polymer ink that combines mutually exclusive chemical bonds between molecules. When an original print shape is set, other shapes can be set by physically processing the printed and dried materials. Alternative forms of curing under ultraviolet light locked in these links. Then, once two forms of programming are set, the material may deform back and forth when heated or cooled.
Researchers must find a polymer mixture that can be printed in a catalyst bath and still maintain its original programmed shape. Barnes recommends: “We must optimize many parameters, from the solvents and catalysts used to the degree of swelling and ink formulations, so that the ink cures fast enough for printing without inhibiting the desired final shape drive.”
Although the team described this method as very useful when developing LCE actuators with complex structures and shape changes, Barnes said one limitation of the printing process is the inability to create unsupported printed fibers (such as cylinders) structure.
“To do so would require a solution that gels just enough to support itself during printing,” she stated.
“Future work will further optimize the printing formula and use scaffold-assisted printing techniques to create actuators that transition between two different complex shapes,” revealed Barnes. “This opens the door to printing soft robotics that could swim like a jellyfish, jump like a cricket, or transport liquids like the heart.”
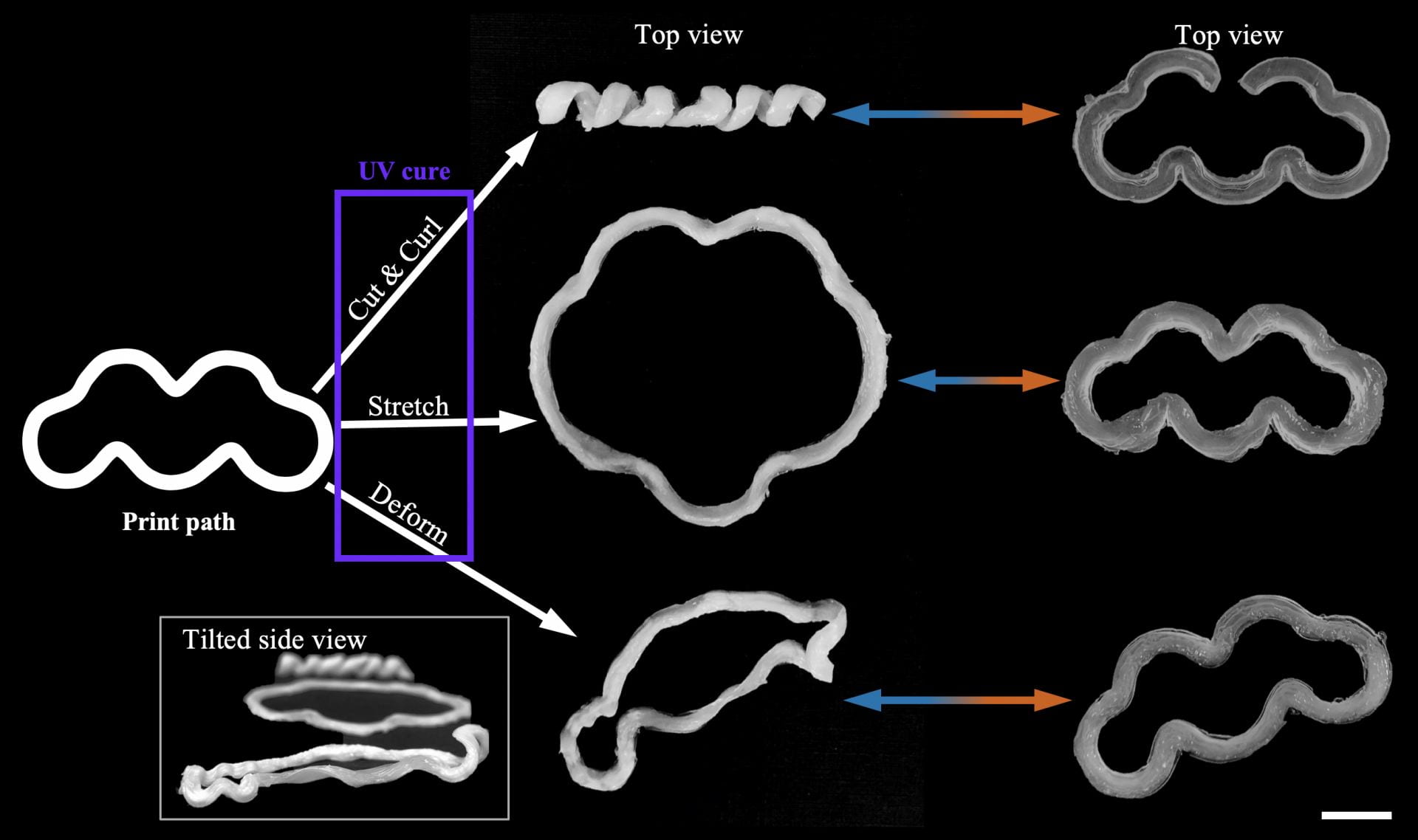
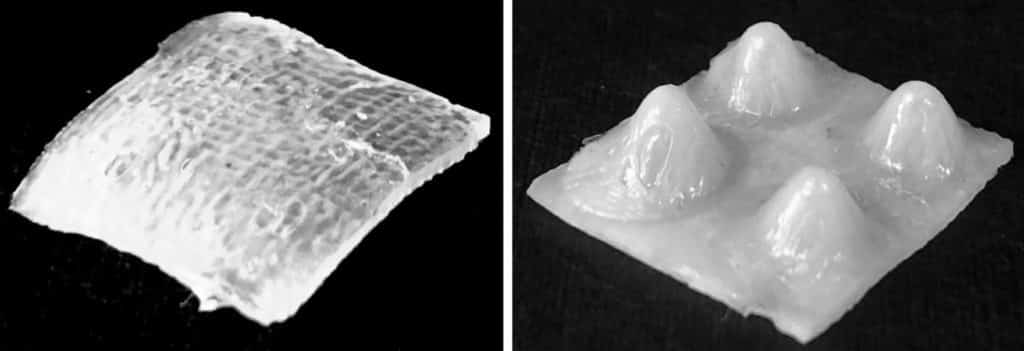
By programming a variety of arbitrary shape changes in a single printed material, a method of generating an expanded LCE structure in the LCE sheet and symmetrically breaking the shape change has proved the potential of this method in the study. For example, the team printed and programmed a circular LCE of shape L, an expanded honeycomb LCE, and a flat LCE film, and pits appeared on cooling to prove the possible shapes and shape changes produced by 3D printing technology.
Stretch and curl the first circular structure to form a shape that is circular from the side and square from the top at room temperature, and then curl the second circular structure around three consecutive rods to form waves shape. When cooling and heating, both LCEs eventually switch between the programmed shape and the printed circle. The researchers’ printed honeycomb structure was biaxially stretched and shape programmed to form an expanded deformable material.
With the support of the Welch Chemical Research Foundation and the Army Research Office’s Chemical Science Department, research has shown that the team can demonstrate LCE’s reactive 3D printing method, which can directly program complex shape changes of printed soft actuators. In short, LCE’s reactive 3D printing can provide more opportunities for free manipulators and almost any shape changes in soft robot systems.