
A group of researchers from the Ulsan National Institute of Science and Technology in South Korea used 3D printing and sacrificial molding to produce a walking starfish-shaped soft robot.
Although the five limbs of the starfish are not obvious at first, they are complex tension structures. These structures act like tendons in a biomechanical system, have variable stiffness and flexibility, and can be programmed, which means they can be actuated to cause controlled movements. In this case, the drive mechanism is an electromagnetic tendon-it can contract and relax the rest of the tension structure to make the robot move in a certain direction.
What is a tensegrity structure?
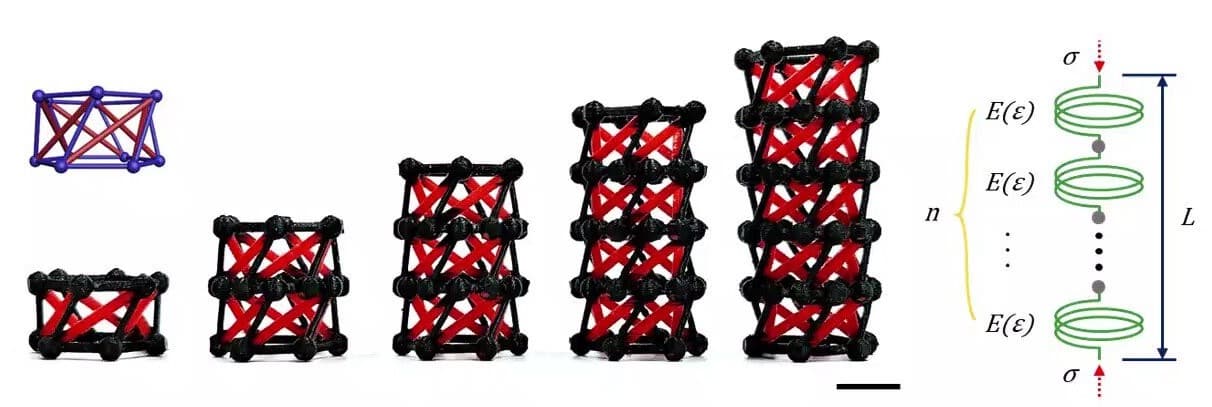
In recent years, the tension structure has become synonymous with art desk toys, but the same principle can also be applied to more functional applications. The system described by tension or tensile integrity looks like it is under compressive load, but is actually fully supported by tensile (tension) forces.
By combining rigid struts with a multi-directional network of tendons, the tension structure can provide structural integrity and flexibility through some ingenious tendon manipulation. They exhibit high stiffness-to-mass ratio, controllability, and large-scale deployment potential. By also integrating smart or functionally graded materials into the tension structure, they can be further functionalized with improved controllability.
Since structures require a relatively precise balance to operate, their assembly is usually a highly manual process, so there are few manufacturing methods that can generate complex 3D tension. However, these structures are abundant in natural systems such as the human musculoskeletal system, so the research team believes that research on them may be very valuable for the development of biologically inspired robots.
3D printed starfish robot
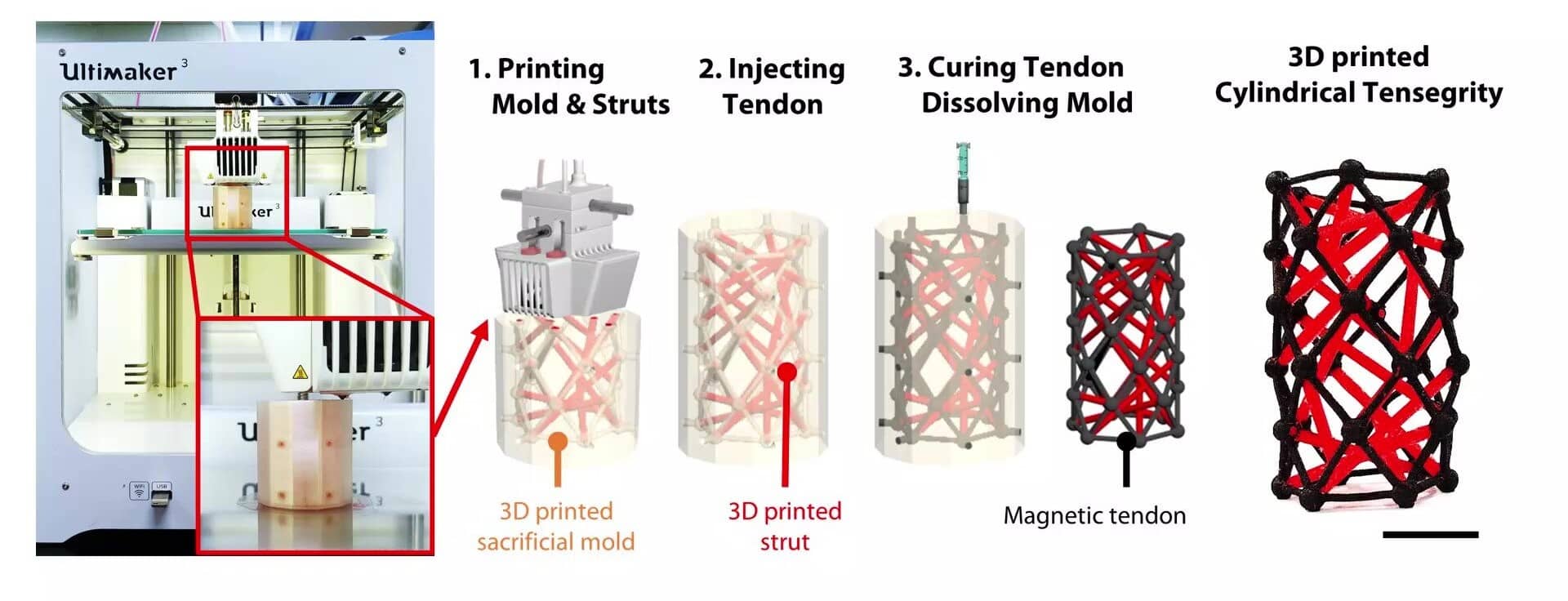
The method designed by the research team is actually a very clever method. They used a commercially available Ultimaker FDM printer to make sacrificial molds for structural tendons, while also printing isolated rigid pillars (black beams) in the mold. Once the shrinkable “smart material” is injected into the mold, the mold will generate continuous internal ribs (red beams) found in the tension structure. Once the smart material solidifies, the sacrificial mold dissolves, and what remains is a softer smart tendon network integrated with rigid pillars.
For the remaining limbs, this “print, inject, dissolve” cycle is repeated four more times, and five cylindrical structures are assembled around the central body to form a starfish shape. Driven by magnetic force, the red tendons in each limb can contract and relax in coordination with each other to move the robot in any direction.
The team believes that they are the first to propose a simple method of 3D printing complex tension structures, and said that novel design principles can pave the way for new methods of soft robot production.
More details of this research can be found in the paper titled “3D Printing Programmable Tension for Soft Robots”. It is co-authored by Hajun Lee, Yeonwoo Jang, Jun Kyu Choe, etc.
3D printing of soft robotic equipment is attracting more attention every year. A group of researchers from the San Diego University in San Diego recently developed a new method for 3D printing liquid crystal elastomers (LCE), which only needs to change the printing parameters to achieve functional gradients. A potential application is a new type of actuation material that can tightly control the stiffness and shrinkage of the LCE by heating during and after printing.
Elsewhere in Asia, researchers recently 3D printed a soft robotic finger driven by an embedded single-electrode triboelectric curvature sensor (S-TECS). It can induce bending under ultra-low operating frequency without any external power supply.